
BRAMS Newsfeed
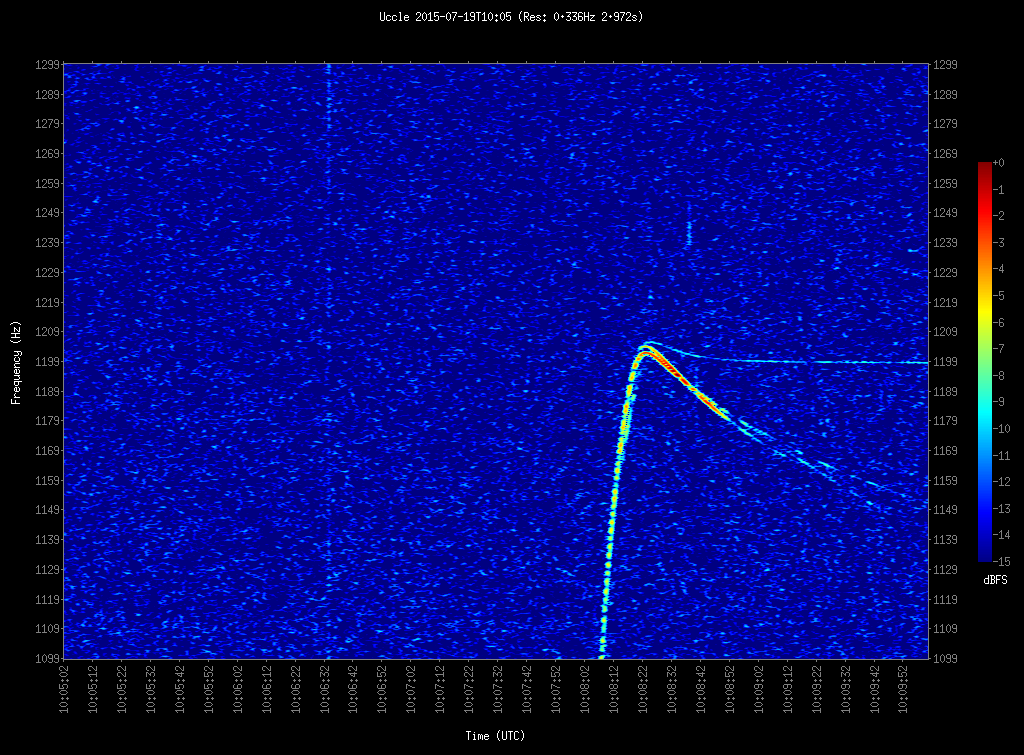
Beacon off during last week-end
Due to violent lightnings near Dourbes, the fuses in the house hosting our instruments were down and had to be manually switched on the next morning. The beacon was off between 23:12 UT on 18th July and 10:08 UT on 19th July. 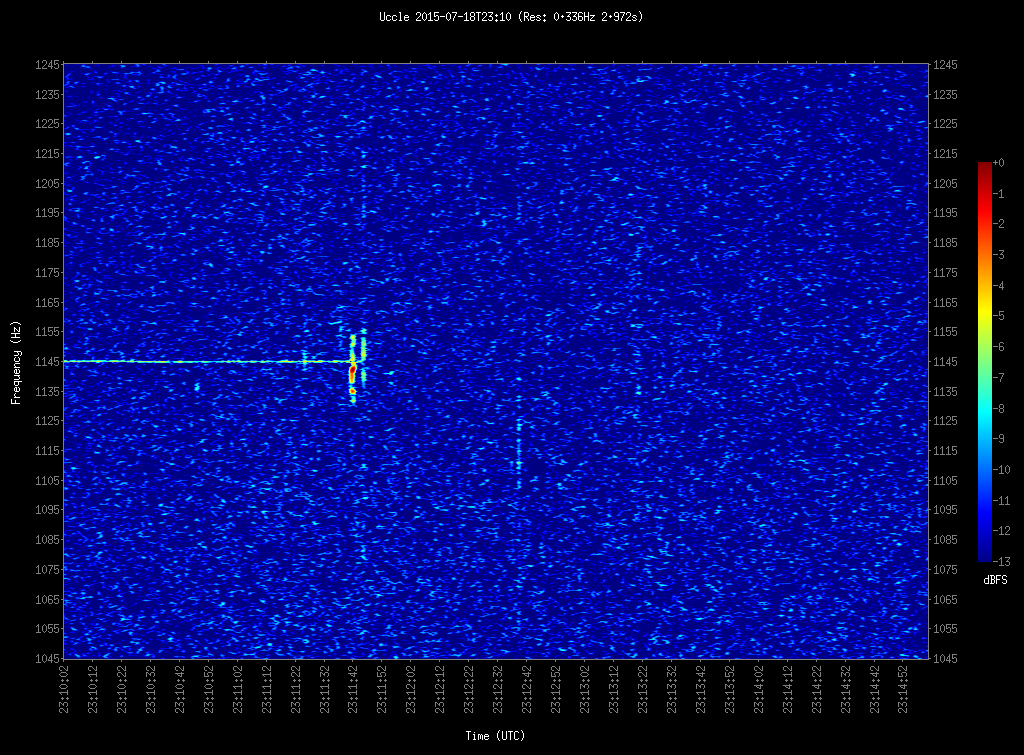
Calibration tests in Dourbes done
The beacon in Dourbes has been switched on again. Tests with the drone are finished. The beacon was off from 1st of July around 11:55 UT until 14:10 UT on 3rd of July. The drone was flying in the far-field of our antenna. The far field is approximately located at ~ 2 D^2/lambda with D being the largest size of the antenna. In our case, with a 8m x 8m grid, D is equal to the diagonal of the reflecting grid and therefore the far field is located at approximately 43m. The drone was flying in circles at a distance of 50 m from the bottom of the antenna. Each circle was carried out at a different elevation (between 30° and 80° with steps of 10°). 30° was the minimal elevation to be sure that the drone was flying way above the tallest trees nearby. For each circle, 36 positions were considered to span the whole azimuth angles with steps of 10°. The drone was staying 15 seconds at each position. Below is a picture of the drone flying above the nearby trees. 
Calibration tests in Dourbes
Calibration tests are planned in Dourbes on July 2 & 3 to obtain the radiation pattern of our transmitter using our drone. Since the transmitter in this case is used as a receiver and the drone carries the transmitter (amplitude calibrator developed at BISA), we will have to switch off the beacon from time to time. Tests may continue on Friday if necessary. 
BRAMS annual meeting at MIRA observatory on 27/06/2015
On 27/06/2015, we had our BRAMS annual meeting at the MIRA observatory in Grimbergen. Thank you to all the participants a nd to Philippe Mollet and the people at the observatory who welcomed us once again. You can find links to the presentations below :
- Recent advances in the BRAMS project - H. Lamy
- Amplitude calibrator for the BRAMS stations - M. Anciaux
- Power profiles of radio meteors - S. Calders
- Etude du profil d'un écho underdense - P. Ernotte
- Calibration measurements for the BRAMS network - S. Ranvier
- The BRAMS Zoo project
- Update of the FRIPON project and the determination of meteor trajectory - J. Vaubaillon
- Using the BRAMS beacon for studying meteor induced VLF propagation disturbances - J-L Rault
- Head echoes - F. Verbelen
New BRAMS station installed in Maasmechelen
On 28/04/2015, a new BRAMS station has been successfully installed in Maasmechelen. Thanks to Bjorn Di Paolo for helping us install and hosting the BRAMS station. As can be seen, antennas will from now on be installed vertically. We have also installed the amplitude calibrator that will progressively be added to all BRAMS stations. 
New antenna at BEUCCL
The antenna at the BEUCCL station has been replaced today at around 2 PM LT. The old antenna was there from the beginning and was built in-house. We have now replaced it with a commercial one. The quality of the signal is much better. Because commercial antennas use UHF connectors and not N connectors (like the older one), we temporarily use two adapters : a N-BNC connector followed by a BNC-UHF connector. A N-UHF connector has been ordered and will be added soon.
First flight of the drone in Humain
In the framework of the STCE, we have hired Antonio Martinez to calibrate the BRAMS antennas (and some antennas for solar applications in Humain). As presented during the annual BRAMS meeting, the method is to use a UAV/drone equipped with a transmitter sending a given power at a given frequency. The drone can fly in GPS-controlled mode, meaning that it goes to some specific locations pre-registered in its memory. These locations are chosen in order to be in the far-field of the antenna (typically 3 meters for the BRAMS antennas but we will fly a bit further). The transmitter has been designed at BISA and is ready. It will be added very soon as payload below the drone together with a small dipole-like antenna. In order to prevent the modification of the radiation pattern of this emitting antenna by the metallic arms of the drone, a small grid (attached to a cardboard) has been added to the drone to act as a reflecting plane. Last week Antonio made the first tests with flying the drone in Humain. You can see some pictures below. From left to right, (a) the drone flying (OptoKopter with 8 rotors, the cardboard is clearly visible below the drone), (b) the drone flying near the solar antenna, (c) the drone flying above 2 antennas of our interferometer in Humain 

 The two pictures below show the remote control system of the drone as well as the box containing the transmitter that we will use as payload (as well as a battery).
The two pictures below show the remote control system of the drone as well as the box containing the transmitter that we will use as payload (as well as a battery). 
![]()





